
best365体育官网平台3项本科毕业设计(论文)获评北京市优秀
发布日期:2023-11-14 阅读次数:318次 来源: 本科教学 作者:
据悉,在2023届北京市高校优秀本科生毕业设计(论文)评优工作中,best365体育官网平台有3项毕业设计(论文)获评北京市普通高等学校优秀本科生毕业设计(论文),1篇入选优秀案例收录汇编。本次获评北京市优秀毕业设计(论文)的指导教师陈光荣、李锐明、许西宁三位老师获得省部级“优秀毕业设计(论文)指导教师”认定。
|
序号 |
姓名 |
学号 |
专业名称 |
指导 教师 |
毕业论文 (设计)题目 |
评选项目类型 |
优秀案例 |
|
1 |
沈尧杰 |
19221284 |
测控技术与仪器 |
陈光荣 |
点足式双足机器人运动控制研究 |
个人类 |
|
|
2 |
李丰睿 |
19221251 |
机械工程 |
李锐明 |
个人类 |
是 |
|
|
3 |
张祺轶 |
19222059 |
机械电子工程 |
许西宁 |
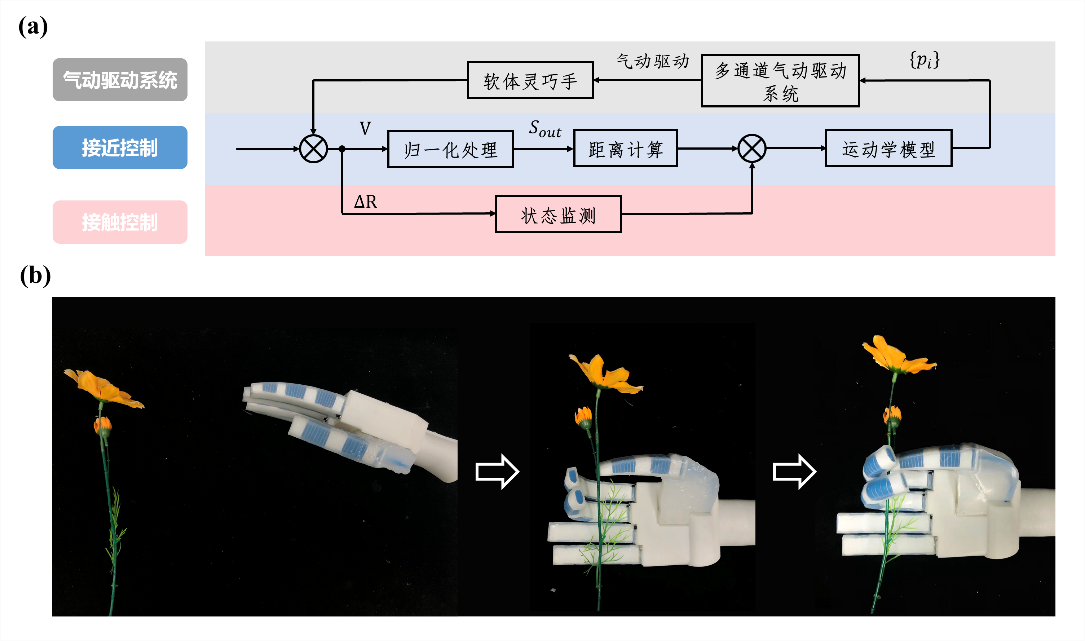
基于多模态柔性传感的软体灵巧手交互运动研究 |
个人类 |
|
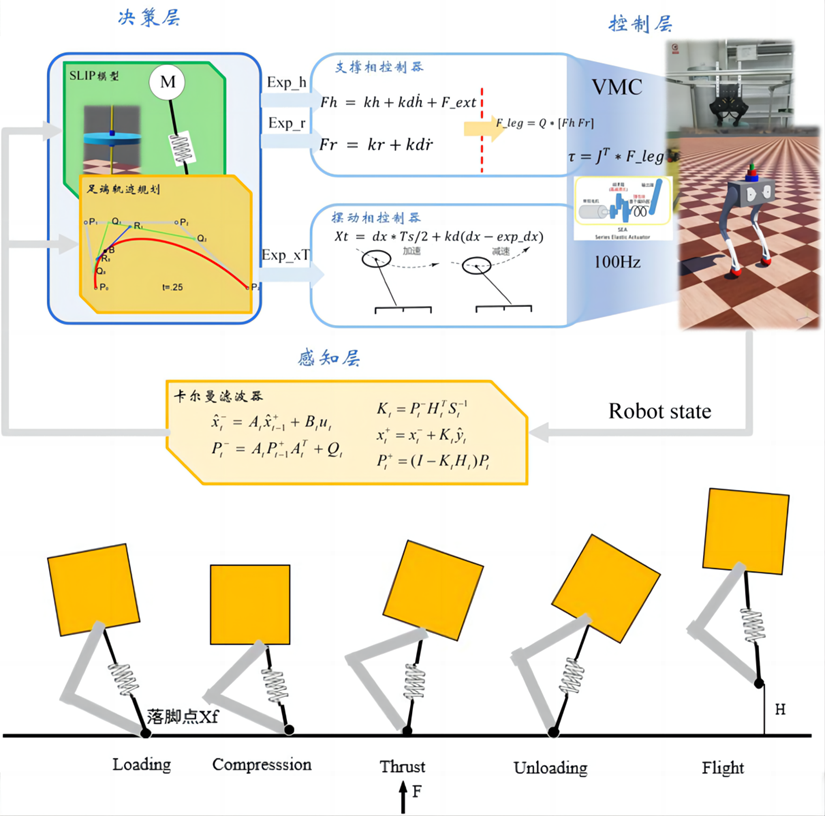
沈尧杰同学的毕业设计《点足式双足机器人运动控制研究》采用DH和拉格朗日法对点足式双足机器人进行建模,分析运动学和动力学得到机器人的正逆解,搭建了点足式双足机器人的硬件和仿真系统。提出了基于SLIP配合VMC算法的分层规划控制器,实现了运动的解耦控制和动态稳定控制,提高了运动的鲁棒性。
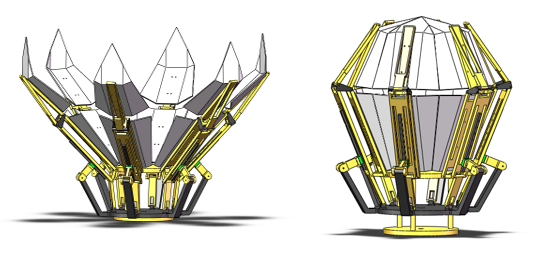
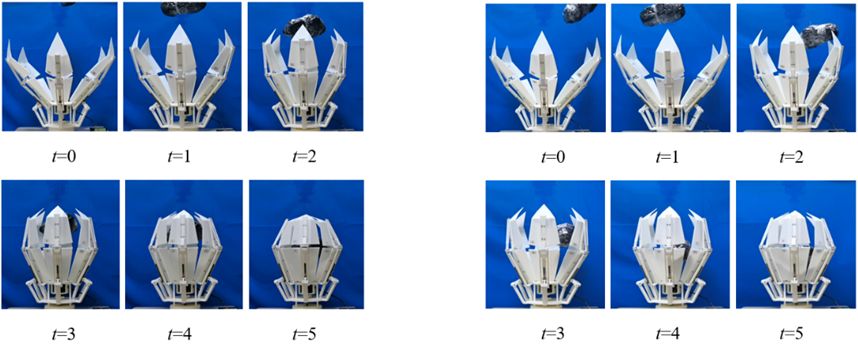
李丰睿同学的毕业设计《具有自锁功能的空间自由物体捕获装置设计与研究》针对空间多模态物体、太空垃圾、在轨卫星、小行星等非合作属性的空间自由物体捕获方式进行研究,设计了符合任务需求的具有自锁功能的空间自由物体捕获装置。研究旨在实现捕获装置轻量化、低成本、无污染设计的同时保证捕获装置在空间任务中拥有更高的稳定性、可靠性和安全性,为填补空间自由物体捕获技术空白,实现我国空间探测水平的进一步发展提供新的思路。
张祺轶同学的毕业设计《基于多模态柔性传感的软体灵巧手交互运动研究》基于刚柔耦合的软体手指驱动器结构设计,利用有限元分析与运动学建模,探究其气驱响应与运动效果。设计了一套内外层芯棒通用的浇筑模具以降低脱模难度,制造驱动器并验证了其结构强度与仿生程度。同时选用、制造、优化与测试了由摩擦电原理和液态金属压阻效应来实现接近与接触感知的柔性传感器。接着提出了一种多模态柔性传感器的空间布局策略。最终建立设备通信与反馈控制模型,实现多模态感知软体灵巧手样机集成与交互运动能力验证。